Quanum Pico 32bit Brushed Flight Control Board とも言うようです。Naze32 互換ハードウェア構成のクワッドコプター用、DSM2受信機+フライトコントローラー。よくあるFC(フライトコントローラー)との違いは、ブラシモーター用であること。1S(シングルセル)リポバッテリー用であること。

とりあえず何するものかというと

ラジコンクワッドコプターを飛ばすためのものです。
左は Hubsan H107D のもの
見た目は置いておいてw
最大の違いは
飛行制御プログラムの設定を任意に変更できる
という点

http://cleanflight.com
標準状態でCleanflightというフライトコントローラーソフトウェアが使われています。
任天堂Wiiのコントローラーに使われていた加速度センサーをマイコンボードで制御して、ラジオコントロールのトライコプター(3ローター機)を作った方々がおられて・・・
延々語れちゃう超分厚い話なので、端折りますがw、そこから進化を続けているコントロールソフトウェアのひとつ。
ざくっというと、安定度と先進度のバランスを取っている立ち位置、な感じでしょうか?

飛ばすにはプロポ(トランスミッター)が必要です。
受信可能なチャンネル数は7ch。
ということで、
DSM2 形式の電波発射できる送信機、かつ、7チャンネルをもつもの。
ワタシはDeviation化済みDEVO7E(日本国内向け技術基準適合のもの)を使用しました。
(※増設スイッチなくても、トリム使えないし、トリムスイッチでどうにかできるんですが、楽したくt(ry
スロット・エレベーター・エルロン・ラダーの4chで飛びますが、AUX1~AUX3 の追加3chがキッチリ使えるとベスト、最低でも3ポジションスイッチかポテンションメーターの5chは必要です。





MicroUSBケーブルをボードに接続。認識されたら、ドライバーによって追加されたシリアルポートを選んで Connect をクリック。

接続に成功すると、こんな画面になります。標準状態でCleanflightというフライトコントローラーソフトウェアが使われています。
任天堂Wiiのコントローラーに使われていた加速度センサーをマイコンボードで制御して、ラジオコントロールのトライコプター(3ローター機)を作った方々がおられて・・・
延々語れちゃう超分厚い話なので、端折りますがw、そこから進化を続けているコントロールソフトウェアのひとつ。
ざくっというと、安定度と先進度のバランスを取っている立ち位置、な感じでしょうか?

とりあえず適当なフレームに適当なブラシモーターを積んで、適当なローターを付け、それにフライトコントローラーを接続した、と、仮定して(;´・ω・)
飛ばすにはプロポ(トランスミッター)が必要です。
使われているプロトコルは DSM2
受信可能なチャンネル数は7ch。
ということで、
DSM2 形式の電波発射できる送信機、かつ、7チャンネルをもつもの。
ワタシはDeviation化済みDEVO7E(日本国内向け技術基準適合のもの)を使用しました。
(※増設スイッチなくても、トリム使えないし、トリムスイッチでどうにかできるんですが、楽したくt(ry
スロット・エレベーター・エルロン・ラダーの4chで飛びますが、AUX1~AUX3 の追加3chがキッチリ使えるとベスト、最低でも3ポジションスイッチかポテンションメーターの5chは必要です。
(※フライトモード変更のため)

ではハードウェアの準備ができたと仮定して、ソフトウェアを最低限セットアップしていきます。
私はWindows10を使いました
必要なのは
・Google Chrome
・Cleanflight Configurator

cleanflight.com のウェブページ上部にある、GUI Download から、Configuratorをダウンロード(Chromeの機能拡張として使用します)

Cleanflight Configurator を起動。
左下にある Cilicon Labs USB-UART ブリッジ CP210x 用ドライバーをダウンロードしてインストール。

ウチだと、Windows の再起動だとうまく認識されず、シャットダウンしてから起動すると認識するようになりました。

このボード、別途シリアル―USB変換要らないのがリーズナブル(∩´∀`)∩
は、置いておいてw
MicroUSBケーブルをボードに接続。認識されたら、ドライバーによって追加されたシリアルポートを選んで Connect をクリック。

ジャイロの水平は、機体に積んでから機体ごと取れるので、とりあえずパスして

Ports タブへ移動
UART2 の RX を Serial RX に、
Save and Reboot 忘れずに。

Configuration タブへ移動。
Motor_Stop : ON
Minimum Throttle : 1000
Maximum Throttle : 2000

下へスクロール、
RX_SEREAL
SPEKTRUM1024
DSM2プロトコルに設定
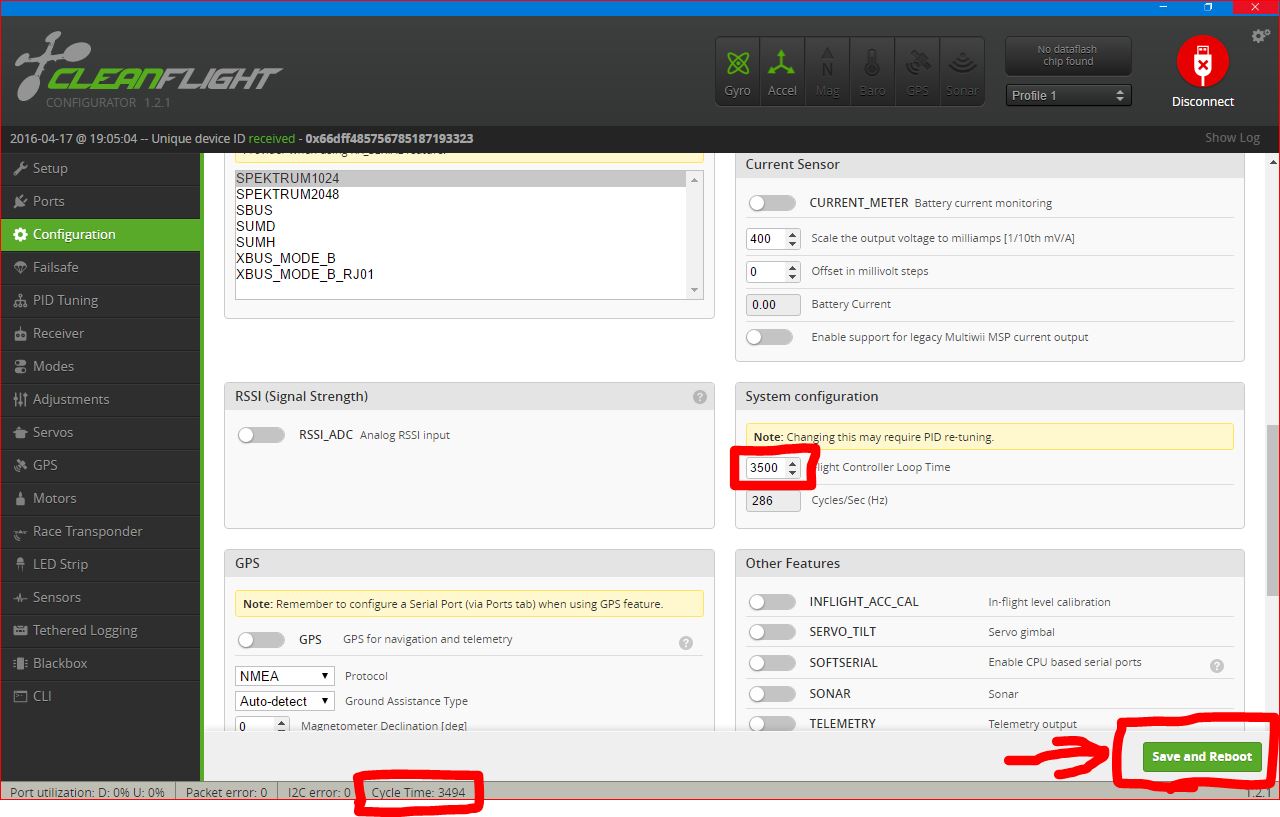
Loop Time はとりあえずデフォの3500でいいと思われます。
ファームウェアのバージョンとかでなんか弄ってるっぽいんですが、下のサイクルタイムが1000しか行かないとかの場合、おそらくそれでうまいことやってるんだと思います・・・w

FCボードをPCに繋ぐ際、プロポ(トランスミッター)の電源を入れておけば、バインドしてくれてる感じですが、ここで再バインドしても受け付けてくれます。
Map を TAER1234 にして、下のバーで確認。
私はモード2送信機ですので、
右スティック左右でロール
右スティック上下でピッチ
左スティック左右でヨー
左スティック上下がスロットル
プロポの設定で、
2ポジションスイッチを AUX1 AUX2
3ポジションスイッチが AUX3
になるように設定しました。

Modes タブへ移動。
このへん、ファームウェアのバージョンで設定できるモードが変わってますが、とりあえず、飛ばす難しさ順に ANGLE/HRIZON モードを割り当て。
3ポジションスイッチの
0に最難関のACRO(RATE)モード
1に難度高のHORIZON
2にPID設定追い込むと涙が出るほどステーブルなANGLEモード
※順に、よくある 100% 80% 50% モードのより高度なもの、と考えると分かりやすいかと思います
AUX2 に HEADFREE モード(※いわゆる【ヘッドレスモード】)
※AIR MODE のあるファームなら、空いているAUXに設定するのも吉
※※ゼロスロットルでも機体安定の為にローターを回す神の手モードwww

とりあえず飛ばす最終段階は CLI (コマンドライン)タブ
Entering CLI Mode, type 'exit' to return, or 'help'
# get motor
motor_pwm_rate = 32000
yaw_motor_direction = 1
# get lpf
gyro_lpf = 42
acc_lpf_factor = 4
accz_lpf_cutoff = 5.000
baro_noise_lpf = 0.600
# get acc
align_acc = DEFAULT
acc_hardware = 0
acc_lpf_factor = 4
accxy_deadband = 40
accz_deadband = 40
accz_lpf_cutoff = 5.000
acc_unarmedcal = ON
acc_trim_pitch = 24
acc_trim_roll = -36
# get deadband
3d_deadband_low = 1406
3d_deadband_high = 1514
3d_deadband_throttle = 50
alt_hold_deadband = 40
deadband = 10
yaw_deadband = 10
accxy_deadband = 40
accz_deadband = 40
ゲットコマンドはいいとして・・・
ともかくモーター設定
# set motor_pwm_rate=2000
リターン
# save
リターン(ッターン!)

save 忘れずに(´・ω・`)
最近のファームはmotor_pwm_rate=2000 以上にしなくても、電源接続いきなりモーター回転!、とはならないようです。
32000 と 2000 の違い・・・、よくわからないw
一応、モーター設定だけでそれなりに飛ぶと思います。
が、
lpf(ローパスフィルター)は、振動がジャイロに悪影響を与えないよう、ジャイロに振動成分を無視させるための設定。やわらかフレームでもシビレル安定を得られますw
deadband と yaw_deadband は、プロポのスティック操作センター付近の混じり合うのを無視させる数値(わかりにくいですねorz)

ウチだけかもしれませんが・・・
Cleanflight 1.12.0 1.12.1 ともに、ジャイロのドリフトが起こり、飛行中にどんどん右かつ前に滑って行ってしまいます。
ACC トリムで調整しても、そこからまたドリフトしていくという状態。
1.10.0 1.11.0 はドリフトしないので、1.11.0 にしています。

と、脱線しましたがw
mortor_pwm_rate を設定して、save し、Disconnect
バッテリーを繋いで、プロポとバインド。
ANGLE MODE にスイッチ(ボード後端右青LED点灯)。
左スティックを右下角に入れて Arm(ボード後端左緑点灯)。
スロットルを上げれば、飛びます(´・ω・`)♪

ダイレクトドライブで機体組んでる方が多いですね。
私は、ギアドライブスキーなのでw
WLToys V212 のフレームベースに弄ったものを主に使っています。
ともかく、ジャイロの使い方がさすがにトイクワッドレベルを遥かに凌駕しています。頭がいいというかなんというか・・・w
V212 のFC から積み替えたら、
ローターからのノイズより
ギアからのノイズのほうが大きくなった
(実話)
(;^ω^)
バッテリーのもちは、ギアドライブのギア比にもよるんでしょうが、V222ギア回り+V636ローターで、
750mAh : 15min
650mAh : 12min
400mAh : 8min
ほど。
まだまだ勉強中(というか試行錯誤中w)なので、いろいろと書いていきたいと思います('ω')ノ
(つづく)